ReadPaper Blog
World-Language-Action Model for Unified World Modeling, Language Reasoning, and Action Synthesis
The paper proposes World-Language-Action (WLA) models, a class of embodied foundation models that unify world modeling, language reasoning, and robot action synthesis. WLA addresses the limitation of prior world-action models that mainly predict future visual states by instead representing the next state through both textual intention and physical dynamics, enabling better long-horizon planning and efficient control. Its WLA-0 prototype reports strong simulated and real-world results, including 92.94% success on RoboTwin2.0 Clean and 56.5% on RMBench, while running at about 40 ms per inference on an NVIDIA RTX 5090.
Source: World-Language-Action Model for Unified World Modeling, Language Reasoning, and Action Synthesis

Mission Briefing: Why the old path is too narrow
The paper starts from a gap in embodied AI: world models and world-action models can learn useful physical priors by predicting future observations, but many of them focus too narrowly on the next visual state. Yi Yang, Zhihong Liu, Siqi Kou, and colleagues argue that visual prediction alone burdens a model with low-level pixel or frame detail while failing to provide the semantic abstraction needed for complex robot tasks. Their central claim is that the “next state” for robot control should include both high-level textual intention and low-level physical dynamics. This framing connects the strengths of world-action models, which learn from egocentric videos and model future physical change, with the strengths of vision-language-action models, which support instruction following and long-horizon reasoning. The implication is that robot policies can become more general and steerable when future prediction is not just visual but also explicitly linguistic and action-relevant.
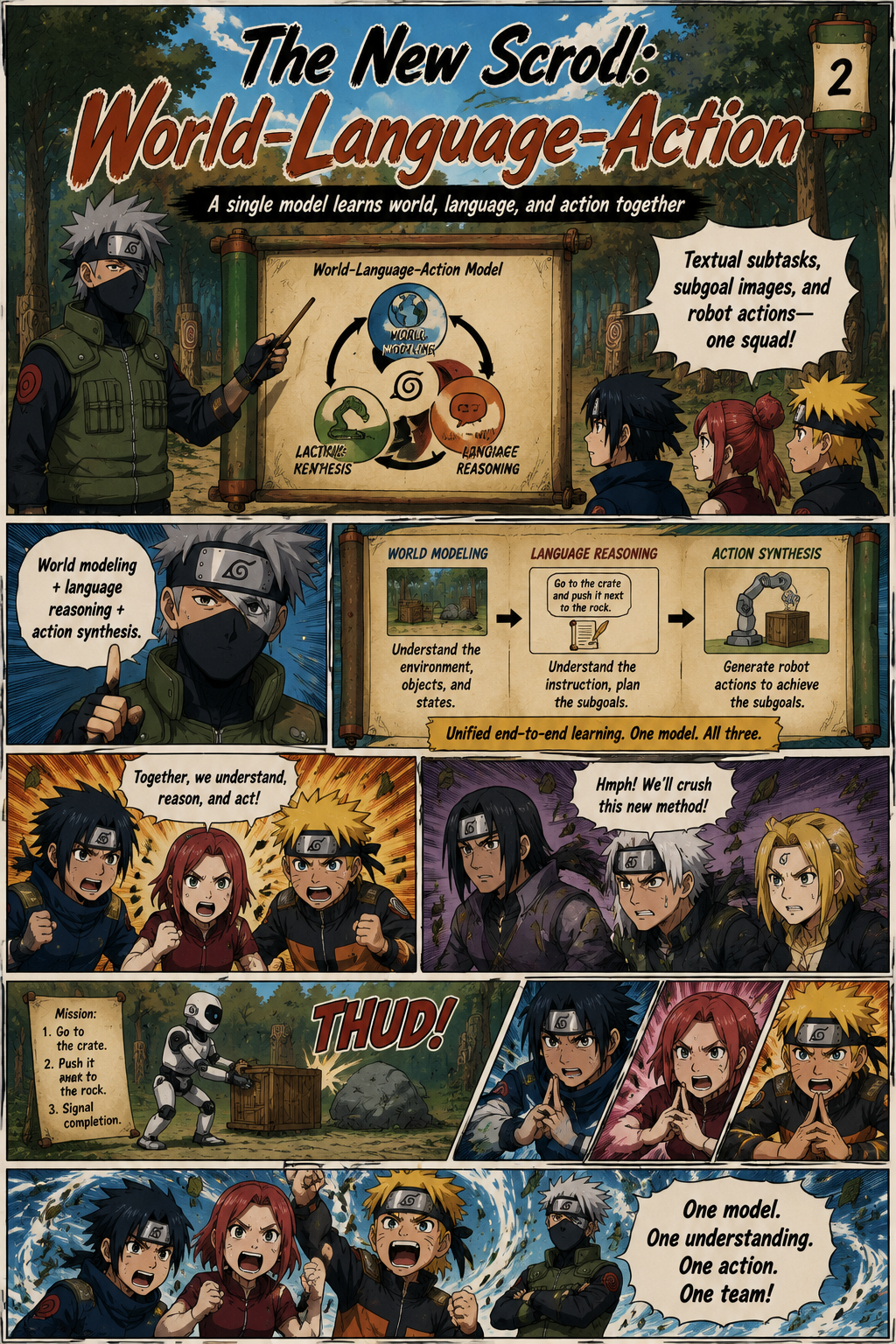
The New Scroll: World-Language-Action
World-Language-Action models are introduced as a unified architecture that takes textual instructions, images, and robot states as inputs and jointly predicts textual subtasks, subgoal images, and robot actions. The paper formulates the model as a multimodal foundation model for physical AI, mapping images, text, and proprioceptive state to images, text, and executable action chunks. At each time step, WLA processes the current observation, a historical observation, the robot state, and the instruction, then predicts an action horizon preceded by a textual intention and a future visual state. This design allows the framework to use heterogeneous supervision, including robot demonstrations, image-text data, egocentric videos, and cross-embodiment robot videos with or without action annotations. By making language reasoning, world prediction, and control part of the same training objective, the paper positions WLA as a bridge between WAM-style physical modeling and VLA-style task reasoning.
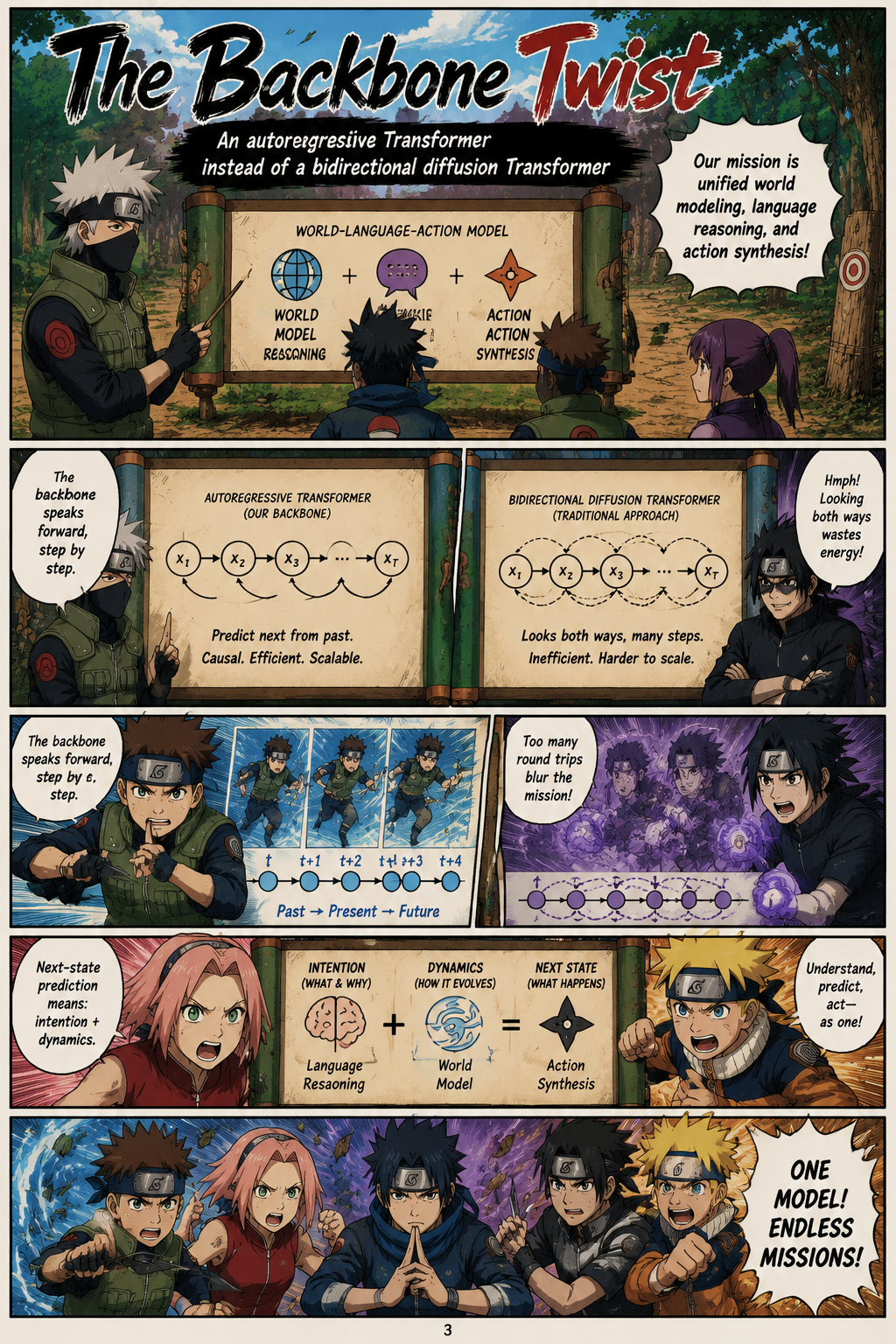
The Backbone Twist
A key methodological shift in the paper is the use of an autoregressive Transformer backbone rather than the bidirectional diffusion Transformer commonly used in world-action models. The autoregressive backbone is chosen because it can inherit the text-generation and context-management abilities of pretrained vision-language models, which are important for producing textual subtasks and maintaining memory in long-horizon tasks. WLA trains this backbone to predict high-level textual intention as a sequence of subtasks decomposed from the original instruction, with a memory buffer accumulating prior predicted subtasks for later decisions. In parallel, the same backbone produces compact physical dynamics through meta-queries appended to its context, allowing causal attention to aggregate information from observations, instructions, memory, and predicted subtasks. The paper’s architectural claim is that next-state prediction becomes more useful for control when it is split into semantic intention and grounded dynamics rather than forced into a single future image representation.
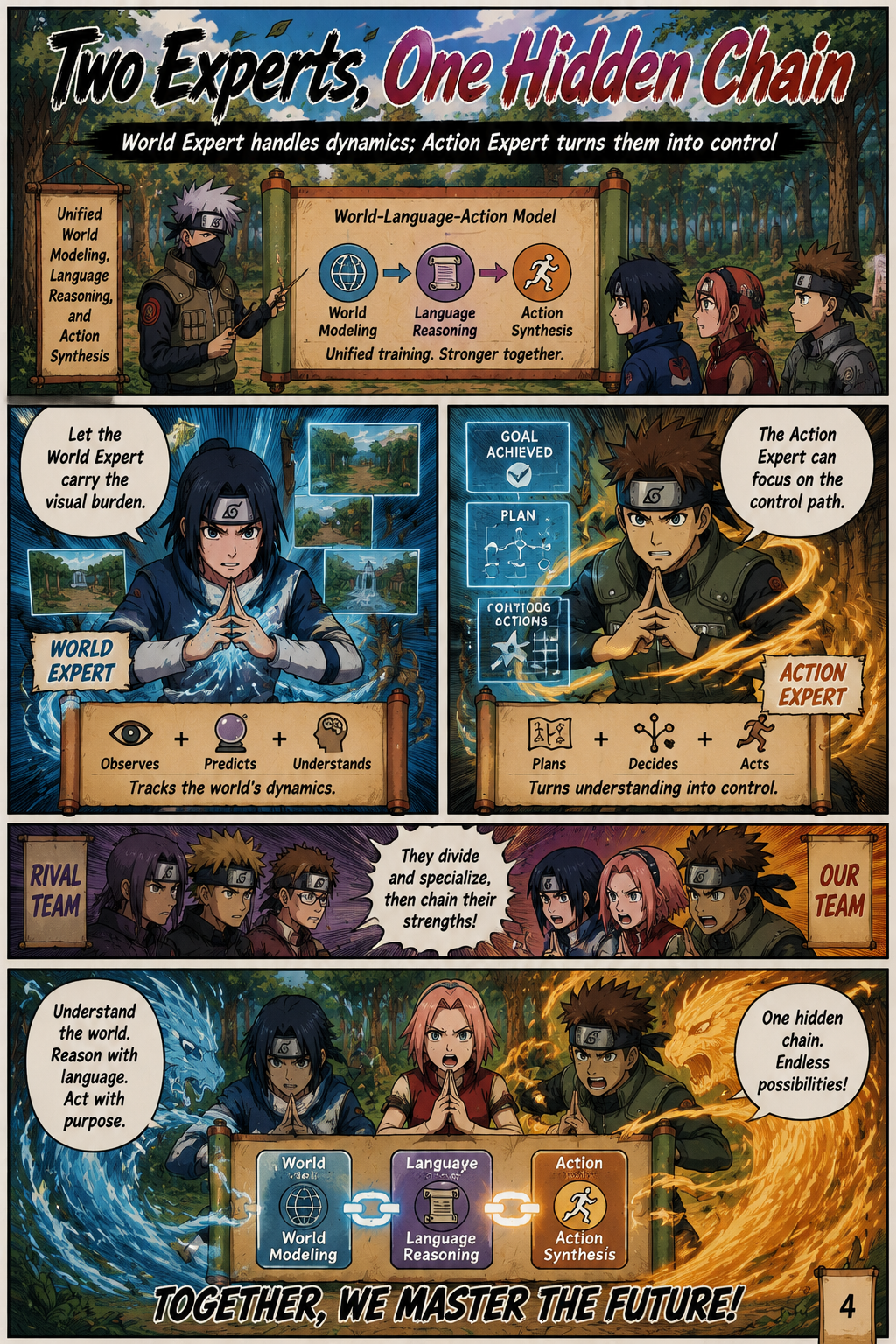
Two Experts, One Hidden Chain
The paper divides low-level prediction and control between a World Expert and an Action Expert, both conditioned by representations produced by the autoregressive backbone. The World Expert receives the compact physical dynamics and the current visual-state representation, then predicts the future visual state, specifically through VAE feature representation rather than directly requiring the backbone to reconstruct all visual details. This world-modeling objective is meant to make the backbone encode the core transition information, described in the paper as a form of latent action, while leaving fine-grained visual generation to the dedicated World Expert. The Action Expert uses the same meta-query outputs to generate executable action chunks, so physical dynamics learned through world prediction can influence action synthesis. A notable efficiency claim is that this influence is implicit through training, allowing the World Expert to be disabled during normal inference while still benefiting the action policy.
Proof in the Field
The evidence reported for WLA-0 emphasizes efficiency, long-horizon behavior, and generalization across simulated and real-world settings. WLA-0 is described as a prototype with 2B active parameters that achieves about 40 ms per inference on an NVIDIA RTX 5090, supporting real-time use in dynamic environments. The paper reports state-of-the-art or strong performance on several benchmarks, including 92.94% success on RoboTwin2.0 Clean and 56.5% success on RMBench, a long-horizon and memory-dependent benchmark where language-based planning, memory use, and error correction are important. It also reports robustness in real-world tasks and notes that WLA-0 halves the completion time of a baseline WAM on Stack Cup, highlighting the practical value of avoiding heavy world prediction at inference. The authors further argue that WLA can learn novel tasks from cross-embodiment robot videos without action annotations, suggesting that unified world-language-action training could expand usable robot-learning data beyond conventional action-labeled demonstrations.