ReadPaper Blog
PlatonicNav: Unveiling Semantic Correspondence in Navigation with Platonic Topological Maps
PlatonicNav studies whether vision-and-language navigation and object goal navigation can be understood as different interfaces to the same object-centric semantic structure in an environment. The paper proposes a training-free navigation framework that builds a vision-only Platonic Topological Map with a self-supervised visual encoder, then grounds language goals through blind matching rather than paired vision-language data. Its reported experiments on HM3D-IIN, OVON, R2R-CE on MP3D, and a Unitree Go2 deployment suggest that shared semantic correspondence can support navigation across tasks, modalities, and embodiments.
Source: PlatonicNav: Unveiling Semantic Correspondence in Navigation with Platonic Topological Maps
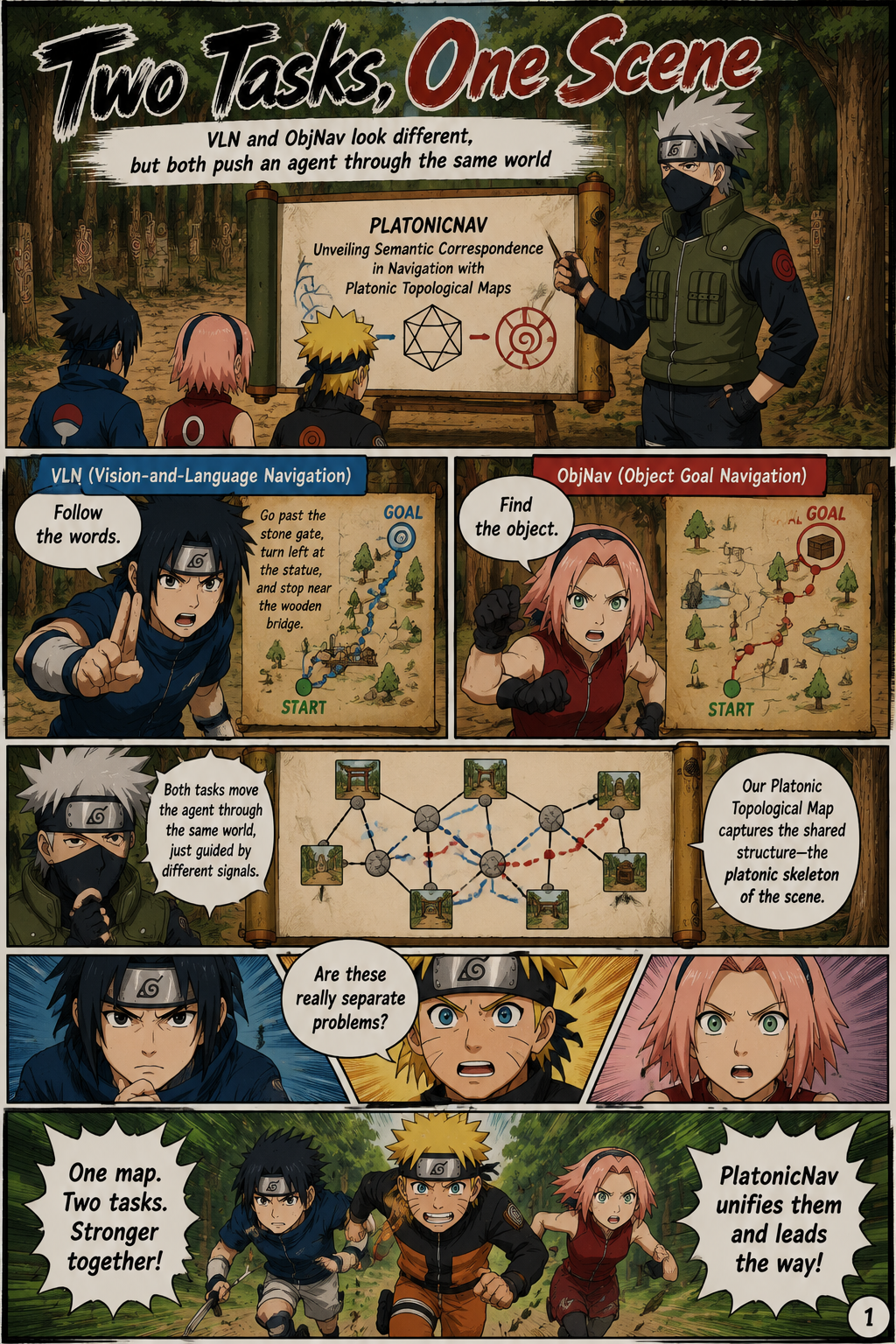
Two Tasks, One Scene
The paper begins from the observation that Vision-and-Language Navigation and Object Goal Navigation are usually treated as separate embodied AI problems despite sharing the same physical substrate. In VLN, an agent follows natural-language instructions grounded in visual observations, while in ObjNav, the agent searches for an object category specified as a goal. PlatonicNav argues that both tasks require the agent to connect visual perception, object-level semantics, and spatial decision-making inside one environment. The central research question is therefore not merely how to build another multimodal navigation architecture, but whether these task interfaces already expose a common semantic geometry. This framing matters because a shared foundation could reduce dependence on task-specific supervision and make navigation systems more transferable across goals and embodiments.
The Gap in Current Methods
The paper identifies a gap in recent efforts to unify VLN and ObjNav: many approaches rely on architectural fusion, mixed-task training, or large vision-language pretraining without testing whether the underlying representations are already semantically compatible. The authors argue that this leaves open an important possibility, namely that independently trained vision and language encoders may share enough relational structure to make some explicit cross-modal supervision redundant. They also note that object-centric topological maps, although naturally close to scene semantics, often still use CLIP or large vision-language models to ground language goals. PlatonicNav positions this reliance on paired or contrastive cross-modal data as a limitation rather than a necessity. The paper’s motivation is to test whether a purely vision-built map can become a semantic substrate for vision-only ObjNav, cross-modal ObjNav, and VLN.

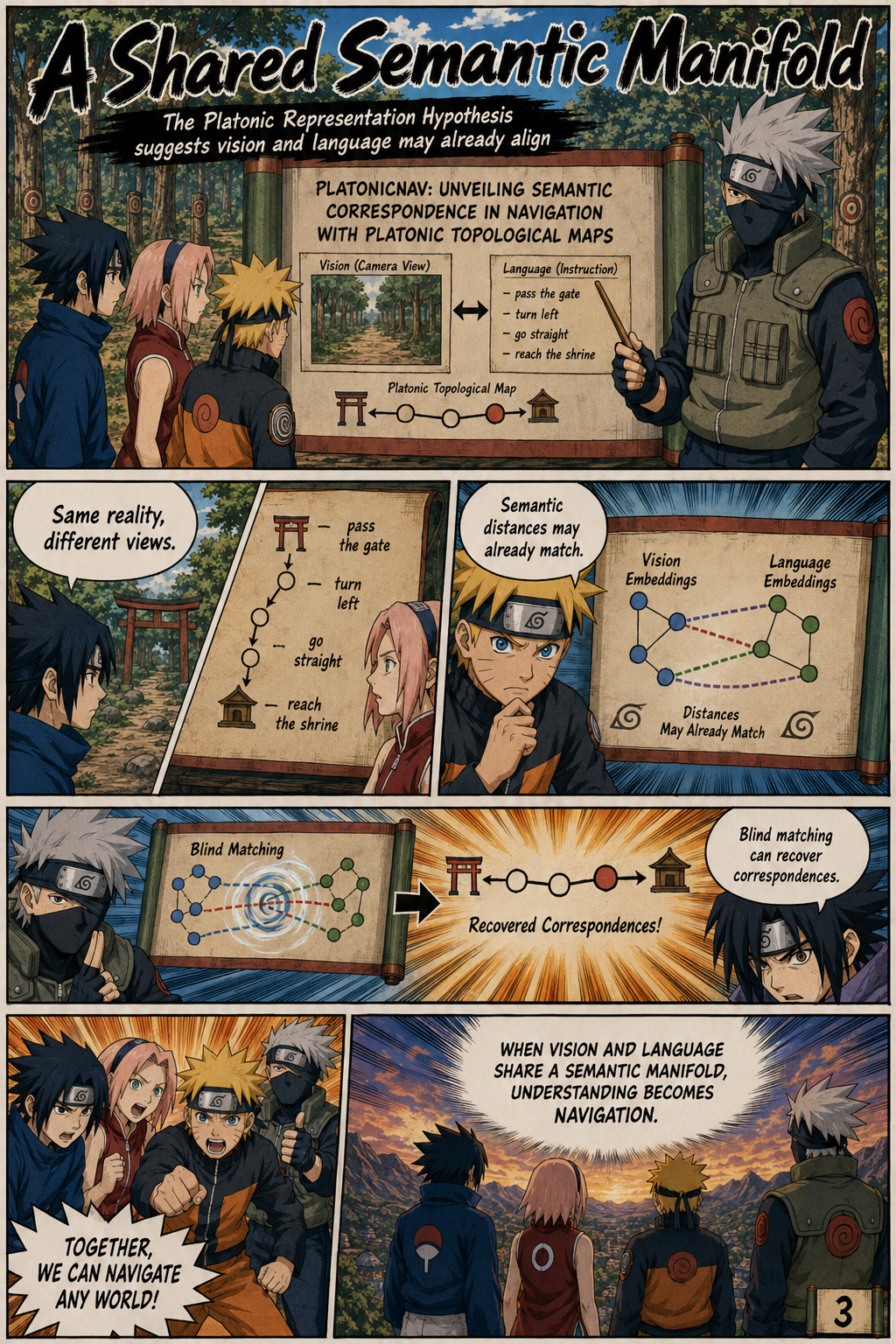
A Shared Semantic Manifold
The conceptual basis of the paper is the Platonic Representation Hypothesis, which proposes that models trained on different modalities and objectives can converge toward a shared statistical model of reality. PlatonicNav extends this idea from static representation learning to embodied navigation, where semantic similarity must support spatial action rather than only representation comparison. The paper’s key claim is that visual and language encoders may preserve similar pairwise relations among concepts, even when they have not been trained on paired image-text examples. This makes blind matching relevant: instead of aligning individual visual and linguistic samples through supervision, the method attempts to recover correspondences by comparing relational structures between representation spaces. In navigation terms, the implication is that object categories, language goals, and visual map nodes can be treated as different views of the same semantic manifold.
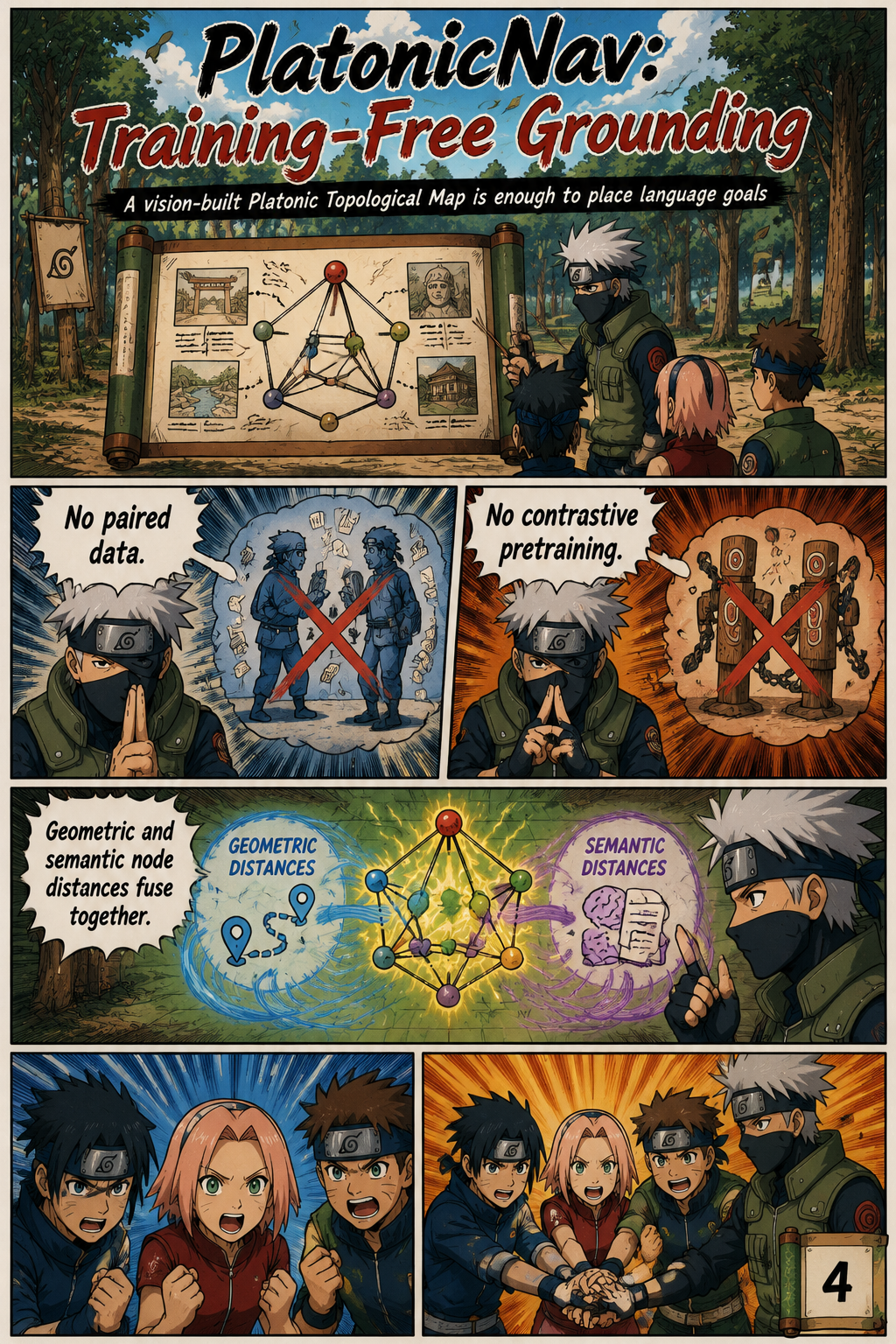
PlatonicNav: Training-Free Grounding
PlatonicNav operationalizes this hypothesis through a training-free framework centered on a Platonic Topological Map. The map is built from object segments produced by a self-supervised visual encoder, so its nodes are grounded in visual observations rather than language-labeled supervision. The method fuses geometric distances with semantic node distances, allowing the map to encode both spatial connectivity and object-centric meaning. Language goals are then grounded by blind matching, which uses the structure of vision and language representation spaces rather than paired vision-language data, contrastive pretraining, or a large vision-language grounding model. This design recasts vision-only ObjNav, cross-modal ObjNav, and VLN as different query mechanisms over the same map, rather than as fundamentally separate navigation pipelines.
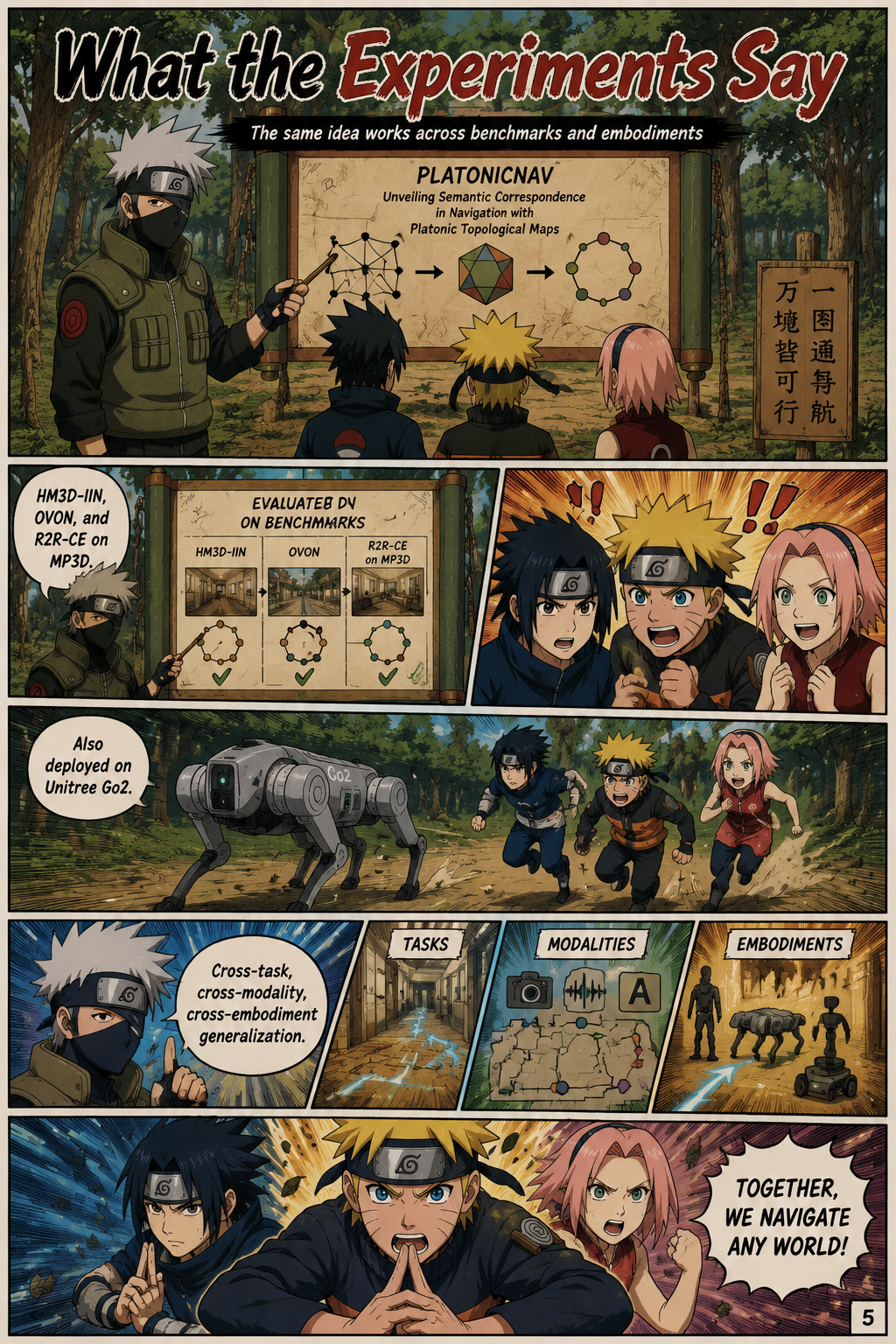
What the Experiments Say
The paper reports extensive evaluation across simulation benchmarks and a real robotic embodiment to test whether the proposed semantic correspondence holds beyond a single task setting. Its experiments include HM3D-IIN, OVON, and R2R-CE on MP3D, covering object-goal and language-conditioned navigation regimes. The reported deployment on Unitree Go2 further examines whether the framework can transfer from simulated evaluation to an embodied platform. The authors present these results as evidence that PlatonicNav generalizes across tasks, modalities, and embodiments without explicit cross-modal training. The broader implication is that embodied navigation may benefit from object-centric semantic maps that exploit latent alignment between vision and language, rather than depending entirely on supervised multimodal grounding.