ReadPaper Blog
NVIDIA OmniDreams: Real-Time Generative World Model for Closed-Loop Autonomous Vehicle Simulation
The paper introduces NVIDIA OmniDreams, a real-time generative world model for closed-loop autonomous vehicle simulation that produces action-conditioned, photorealistic driving video. It addresses the bottleneck of safely evaluating AV policies in rare, dynamic, and safety-critical scenarios by mid- and post-training a Cosmos-based diffusion model on large-scale driving data and integrating it with Alpamayo 1 and AlpaSim.
Source: NVIDIA OmniDreams: Real-Time Generative World Model for Closed-Loop Autonomous Vehicle Simulation
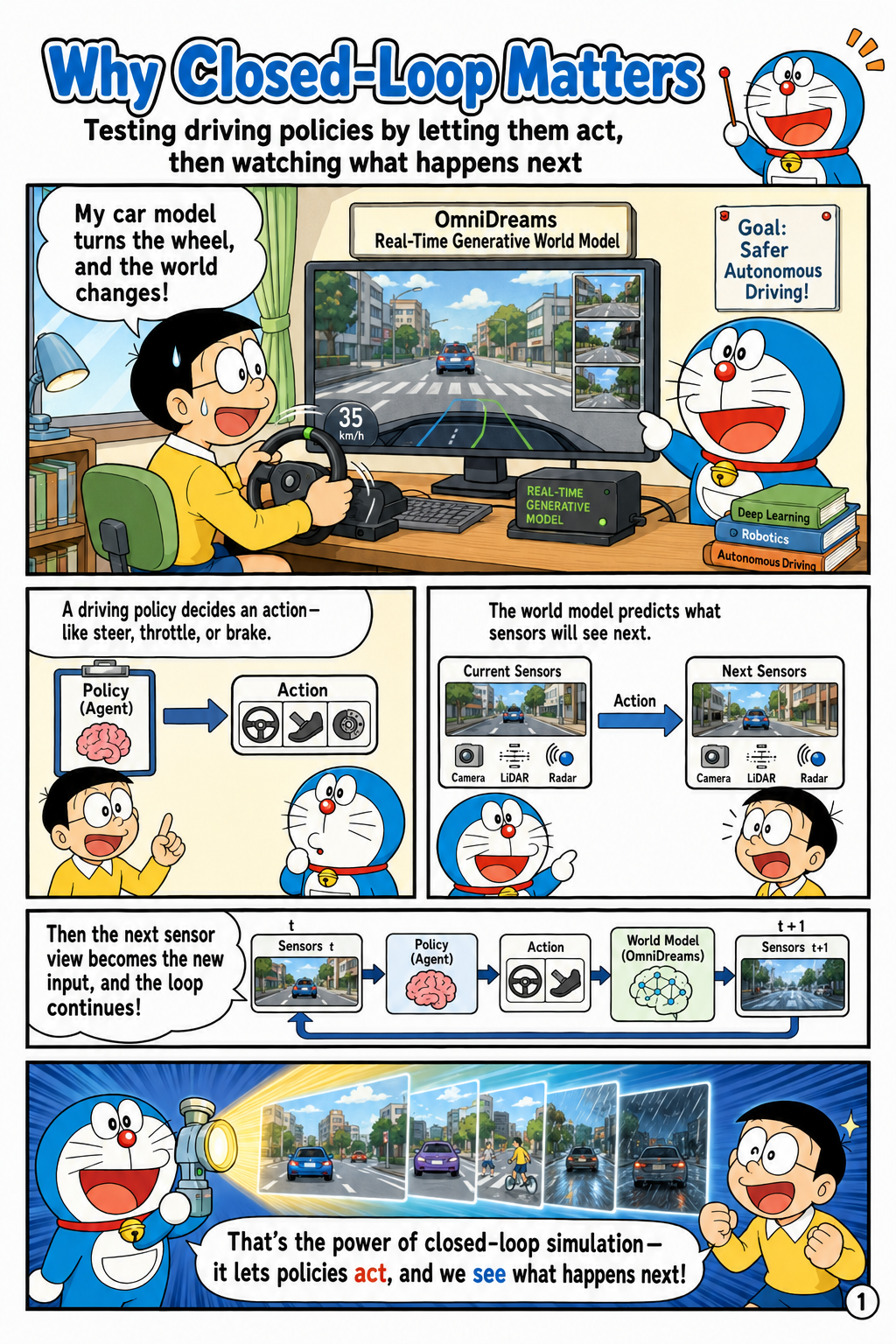
Why Closed-Loop Matters
The paper frames closed-loop simulation as a central requirement for evaluating autonomous driving policies because a policy’s action must change the simulated world before the next observation is generated. In this setting, a model such as Alpamayo 1 issues a driving plan or control input, AlpaSim updates the abstract simulator state, and OmniDreams synthesizes the next camera observations from that updated state. The authors argue that this feedback loop is essential because driving policies do not merely classify static scenes; they influence how traffic participants, road geometry, and future sensor views unfold over time. The motivation is especially strong for long-tail safety evaluation, where rare but consequential interactions are difficult to test at scale in the real world. By targeting real-time, action-conditioned generation, the paper positions OmniDreams as infrastructure for interactive AV testing rather than offline video synthesis alone.
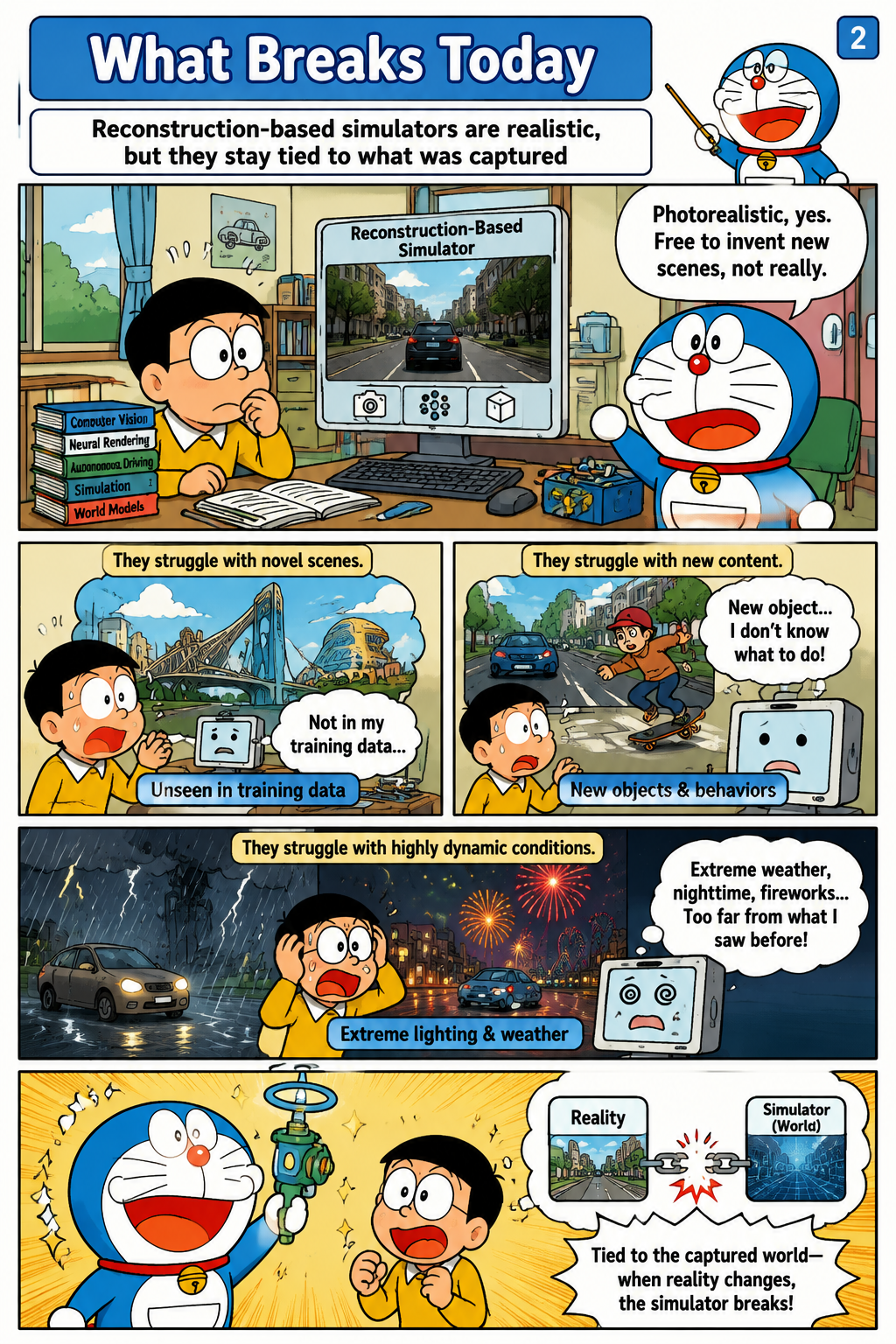
What Breaks Today
The paper identifies a key limitation in reconstruction-based neural simulators: they can provide photorealistic renderings of captured scenes but remain anchored to the original data collection. Such systems support controlled what-if testing inside a reconstructed corridor, yet the authors argue that they struggle to add substantially new scene content, generalize to novel conditions, or model highly dynamic phenomena outside what was observed. This limitation matters for AV evaluation because safety-critical failures often arise from unusual combinations of weather, agent behavior, occlusion, and road context. OmniDreams is proposed as a generative alternative that learns visual and physical priors from large-scale driving data rather than relying only on a specific reconstructed scene. The implication is that closed-loop simulators can become more scalable when the environment can synthesize plausible unobserved outcomes while still responding to structured simulator state and policy actions.
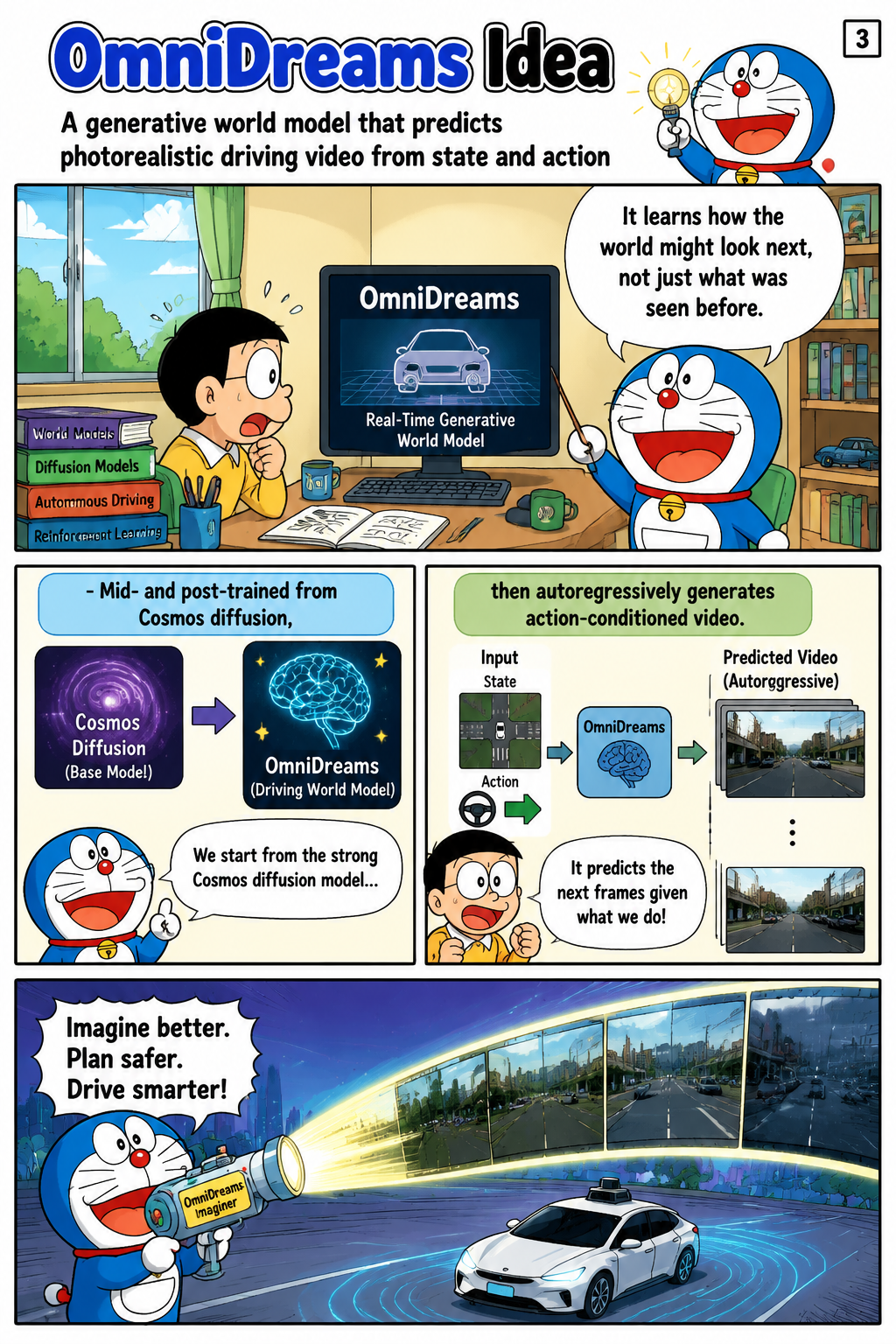
OmniDreams Idea
OmniDreams is described as an action-conditioned generative world model mid- and post-trained from NVIDIA’s Cosmos diffusion model to generate driving videos autoregressively in real time. The model conditions generation on past frames, the current abstract simulator state, and immediate driving actions, allowing each generated segment to depend on the evolving closed-loop trajectory. The paper’s architecture discussion emphasizes multi-view generation, world-scenario control, autoregressive mid-training, distillation, and inference optimization as ingredients needed to make a diffusion-based simulator interactive. The data pipeline extracts conditioning signals such as rendered lane lines, bounding boxes, future ego trajectory information, and textual environment descriptions from real driving logs. By adapting Cosmos-Predict 2.5 with AV-specific data and control signals, the work attempts to combine broad visual priors with the precise responsiveness required for autonomous driving simulation.
What It Can Synthesize
The paper reports that OmniDreams is trained on large-scale real-world driving data, including RDS and RDS-HQ-1M, with synchronized multi-camera clips collected across 15 countries in Europe, Asia, and the United States. The authors state that mid- and post-training on 21k hours of driving scenarios enables the model to synthesize complex unobserved phenomena, including rain, storms, snow, wind, unusual deformable objects, and unpredictable dynamic agent behavior. The simulator is designed to preserve long-rollout consistency by attending to stored KV cache information from past generations during new frame generation. The paper also emphasizes real-time performance, reporting that a single-camera 2B OmniDreams model can render 720p video at 68 FPS on one GB300 GPU and that a four-camera version can reach up to 105 FPS at 720p on 16 GB300 GPUs. These claims support the paper’s broader argument that generative world models can move from visually plausible demonstrations toward responsive simulation systems usable in closed-loop AV workflows.
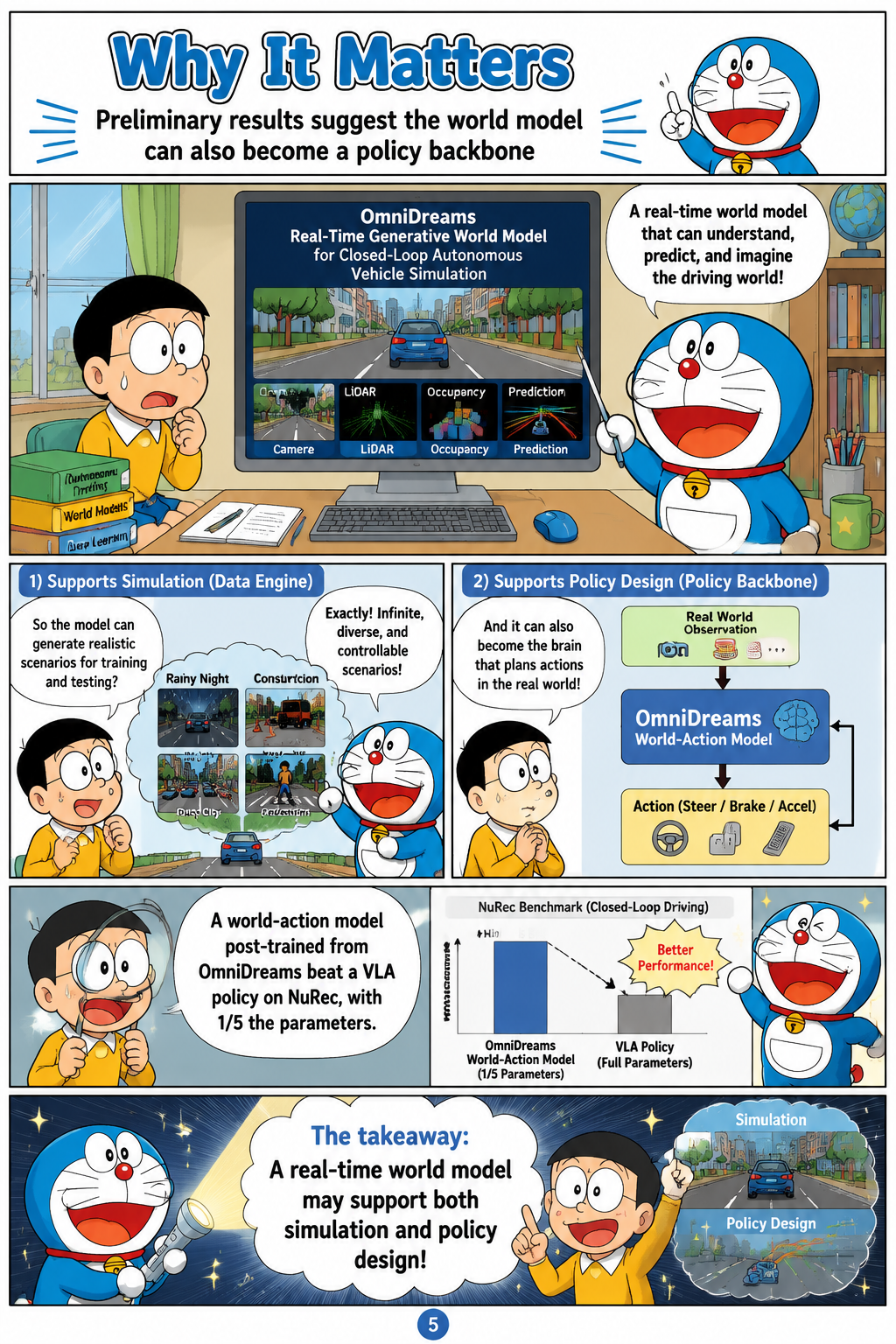
Why It Matters
Beyond simulation, the paper explores whether OmniDreams can serve as a foundation for driving policy architectures through post-training as a World-Action Model. The authors report preliminary results on the Physical AI Autonomous Vehicles NuRec dataset in which a WAM post-trained from OmniDreams surpasses the VLA-based Alpamayo 1.5 research policy while using roughly one fifth of the parameters, about 2B versus about 10B. The excerpt specifies improved collision metrics, including overall collision reduction from 6.9% to 4.2%, front collision from 1.0% to 0.9%, lateral collision from 0.6% to 0.4%, and rear collision from 5.3% to 3.0%. The paper presents this as evidence that representations learned for real-time world generation may encode useful structure for downstream control. Its implication is that autonomous driving research may benefit from models that unify simulation, prediction, and action, rather than treating world modeling and policy learning as entirely separate systems.