ReadPaper Blog
MapAgent: An Industrial-Grade Agentic Framework for City-scale Lane-level Map Generation
MapAgent addresses the problem that lane-level maps for autonomous driving, ADAS, and lane-level navigation are expensive to build and maintain because visual lane prediction alone often fails to satisfy industrial mapping specifications. The paper proposes an agentic refinement framework that combines a BEV vectorization backbone with explicit verification, constraint-aware reasoning, and deterministic map editing through a bounded Judge–Planner–Worker loop. Experiments and deployment evidence indicate that MapAgent improves production baselines in complex long-tail scenes and has been integrated into Baidu Maps for lane-level map generation across more than 360 cities with production automation above 95%.
Source: MapAgent: An Industrial-Grade Agentic Framework for City-scale Lane-level Map Generation
Why the Map Keeps Getting Messy
The paper studies city-scale lane-level map generation, a core infrastructure problem for autonomous driving, advanced driver assistance, and lane-level navigation. Lane-level maps encode road geometry, lane topology, and traffic-control information at high precision, but the authors emphasize that building and maintaining them nationwide remains labor-intensive. Existing vectorized HD map systems such as HDMapNet, VectorMapNet, MapTR, MapTRv2, DuMapNet, and LDMapNet-U have reduced manual work by predicting map vectors from sensor-derived BEV representations, yet the paper argues that one-pass perception is still insufficient for industrial deployment. The central difficulty is that real road scenes often contain worn markings, occlusions, missing visual cues, or ambiguous configurations, so the correct lane network cannot always be inferred from imagery alone. MapAgent is motivated by this gap between visual prediction and the standardized, rule-compliant maps required in production pipelines such as Baidu Maps.
The Gap: Prediction Is Not the Same as Compliance
A major claim of the paper is that map generation must satisfy explicit mapping specifications rather than merely imitate dataset labels. End-to-end vectorized mapping methods usually encode traffic regulations, cartographic standards, lane organization, and topology constraints only implicitly through supervised training data. The authors argue that this makes specification violations a recurring source of human post-editing, especially when a neural backbone produces plausible geometry that is nevertheless inconsistent with mapping rules. MapAgent treats compliance as a first-class objective by inspecting draft lane vectors against both visual evidence and formalized constraints. This reframing matters because industrial lane-level maps require coherent geometry, attributes, and connectivity, not just accurate-looking polylines.
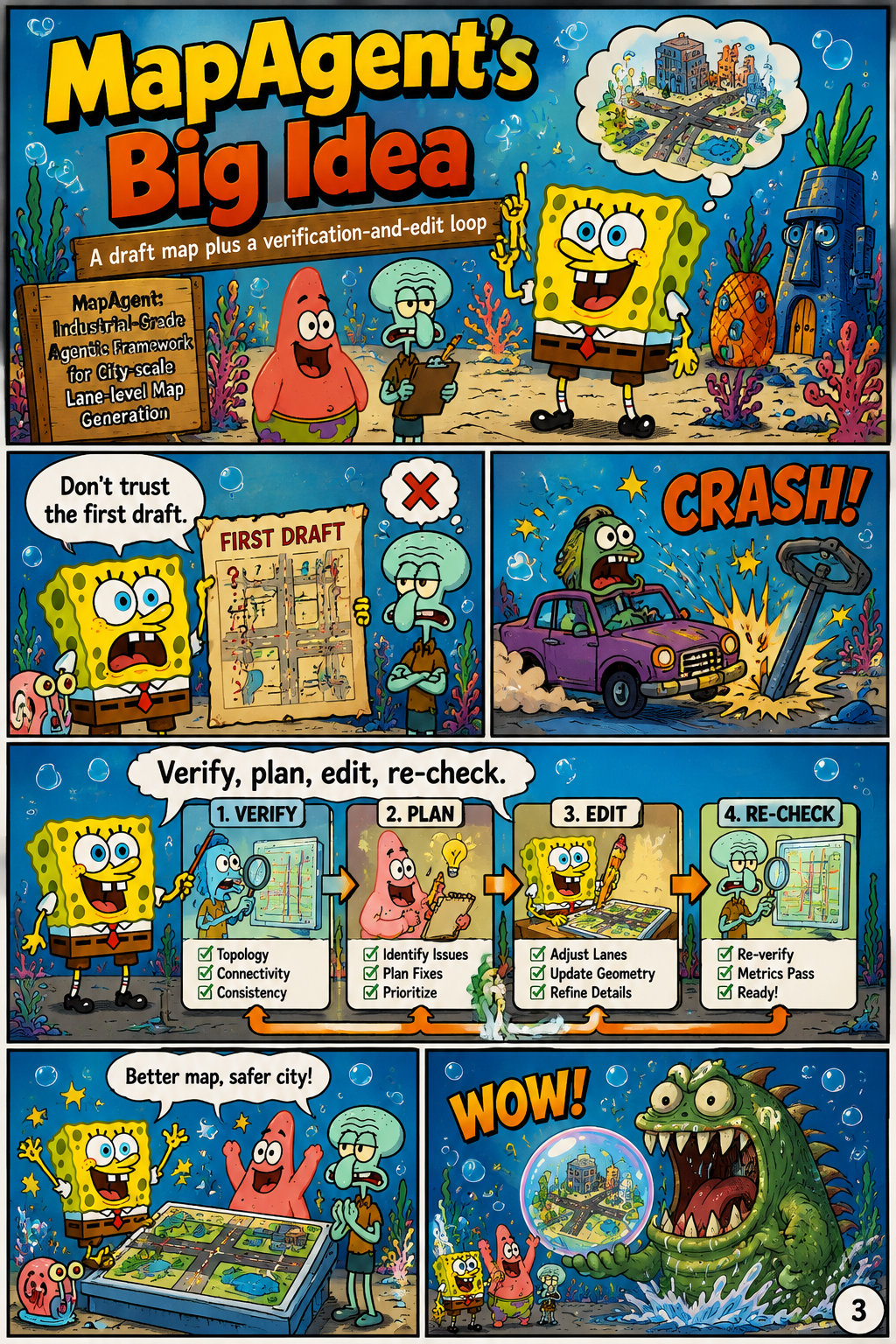
MapAgent’s Big Idea
The paper’s technical contribution is an agentic architecture that refines the output of a vectorization backbone rather than replacing the backbone itself. MapAgent uses a bounded, verification-driven Judge–Planner–Worker loop: a vision–language Judge diagnoses errors by jointly considering the scene evidence and the draft vectors, a tool-calling Planner proposes minimal corrective edits, and a Worker applies deterministic map-editing operations. After edits are made, the system re-validates the map so that refinement is driven by explicit error checking rather than unconstrained generation. The paper stresses that MapAgent is not simply an agent wrapped around map prediction, but a coupled system combining perception, specification verification, constraint-aware reasoning, and controlled editing. This design aims to convert uncertain draft outputs into specification-compliant lane maps while reducing the need for trained human annotators to resolve routine violations.
How It Stays Scalable
Scalability is a central engineering concern in the paper because lane-level production must cover hundreds of cities without sacrificing throughput. MapAgent therefore uses selective triggering: the full agentic refinement process is invoked only for tiles where the backbone’s confidence is low or the draft is likely to require additional scrutiny. High-confidence tiles can pass through the faster production path, while difficult tiles receive the more expensive verification and correction loop. This design reflects the paper’s industrial focus, because applying a heavy reasoning system uniformly across nationwide map data would undermine the efficiency gains of automated vectorization. By bounding the loop and limiting its use to uncertain cases, MapAgent seeks to preserve city-scale processing capacity while improving quality where baseline systems are most vulnerable.
What the Paper Claims It Achieves
The paper reports that MapAgent achieves consistent gains over strong production baselines, with particular benefits in complex and long-tail road scenarios where visual evidence is incomplete or ambiguous. Its evaluation is framed not only around research performance but also around production practicality, since the system has been integrated into Baidu Maps. The authors state that MapAgent supports lane-level map generation for more than 360 cities nationwide and raises overall production automation to over 95%. These deployment claims position the framework as a bridge between academic HD map learning and operational map maintenance at national scale. The implication is that agentic verification and deterministic editing can make learned map generation more reliable without abandoning the efficiency of BEV vectorization backbones.